moabb.paradigms.LeftRightImagery#
- class moabb.paradigms.LeftRightImagery(**kwargs)[source]#
Motor Imagery for left hand/right hand classification.
Metric is ‘roc_auc’
- property scoring#
Property that defines scoring metric (e.g. ROC-AUC or accuracy or f-score), given as a sklearn-compatible string or a compatible sklearn scorer.
Examples using moabb.paradigms.LeftRightImagery#

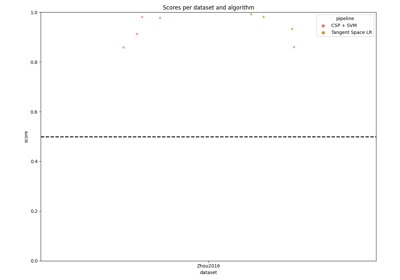
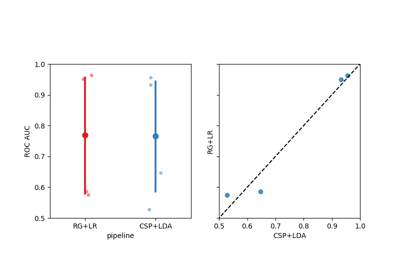
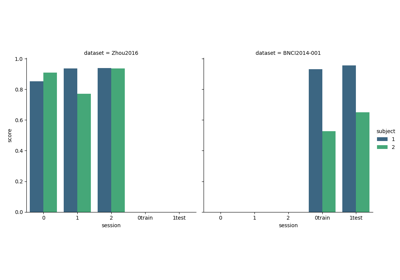
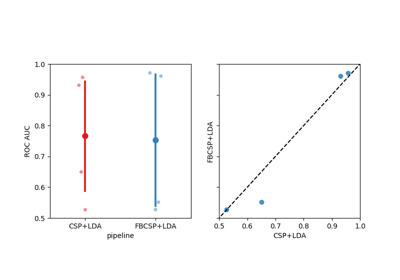
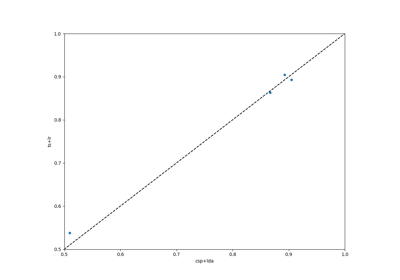
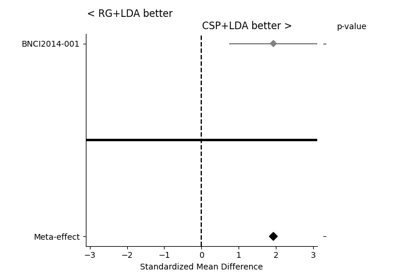
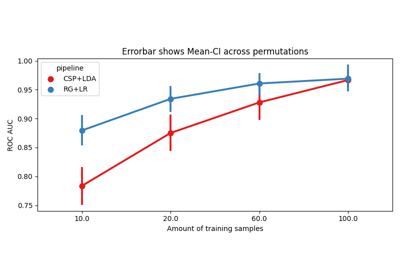
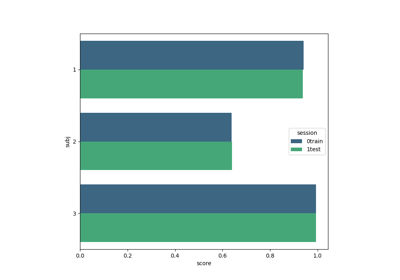
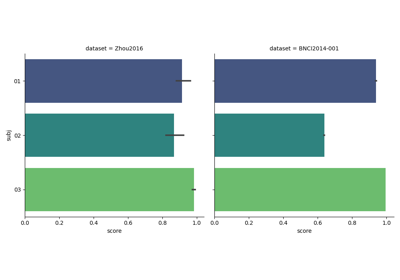
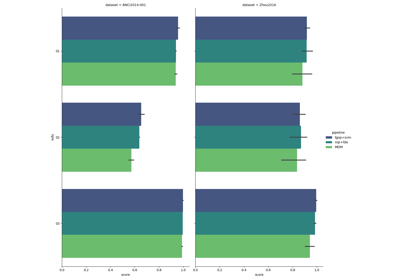
Examples of how to use MOABB to benchmark pipelines.
Examples of how to use MOABB to benchmark pipelines.